Linear Algebra is the study of Vector Spaces
Vectors and Vector Spaces
Vector Space
An Algebraic Structure containing Tensor elements called Vectors, over a Algebraic Field of Scalar values.
Vector Space Element
Note that Vectors need not be . Any possible element of a vector space is by definition, a vector. This means that vector spaces really contain Tensors. 99% of the time when people are talking about vectors, they really mean “Coordinate Vector”, i.e. a vector that represents a location in Space. Whereas a vector represents a location in a Vector Space.
Link to originalAxioms
The Axioms neccessary to qualify as a Vector Space are
- Abelian Group under Addition
- Scalar Multiplication
Abelian Group under Addition Axioms
Link to original
- Closure:
- Associativity:
- Identity:
- Inverse:
- Commutativity: Scalar Multiplication Axioms
- Closure:
- Associativity:
- Distributivity:
- Distributivity:
Vector
An element of a Vector Space, represented in that space either by a direction and magnitude, or by a list of Numbers, each describing the placement along a coordinate axis.
Circular transclusion detected: Mathematics/Algebra/LinearAlgebra/Vector-Space-Element
Operations
Addition
Add elementwise.
Subtraction
Subtract elementwise.
Scalar Multiplication
Multiply elementwise.
Magnitude
The magntiude calculates the distance from the tip of the vector to the origin.
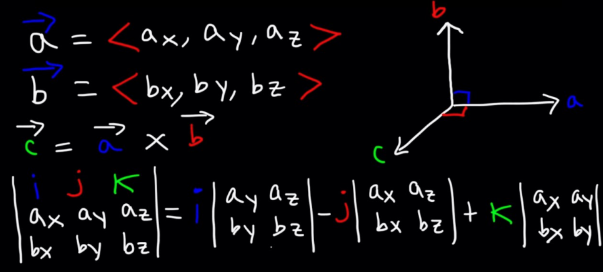
Dot Product
Dot Product
Measures the alignment of its operand vectors on a scale of 0 to 1
Link to original
Cross Product
Link to originalCross Product
where is the Unit Normal Vector of the Plane described by and
Properties
Magnitude
Link to original
Subspaces of
Subspace
A Vector Space’s version of a Subset, with some constraints.
While, a subspace does inherit the axioms of a Vector Space. Verifying a subset is a subspace is simpler; A Subset of is a subspace if it is closed within scalar multiplication and vector addition:
Properties
- , i.e. the Span of any subset is identical to itself
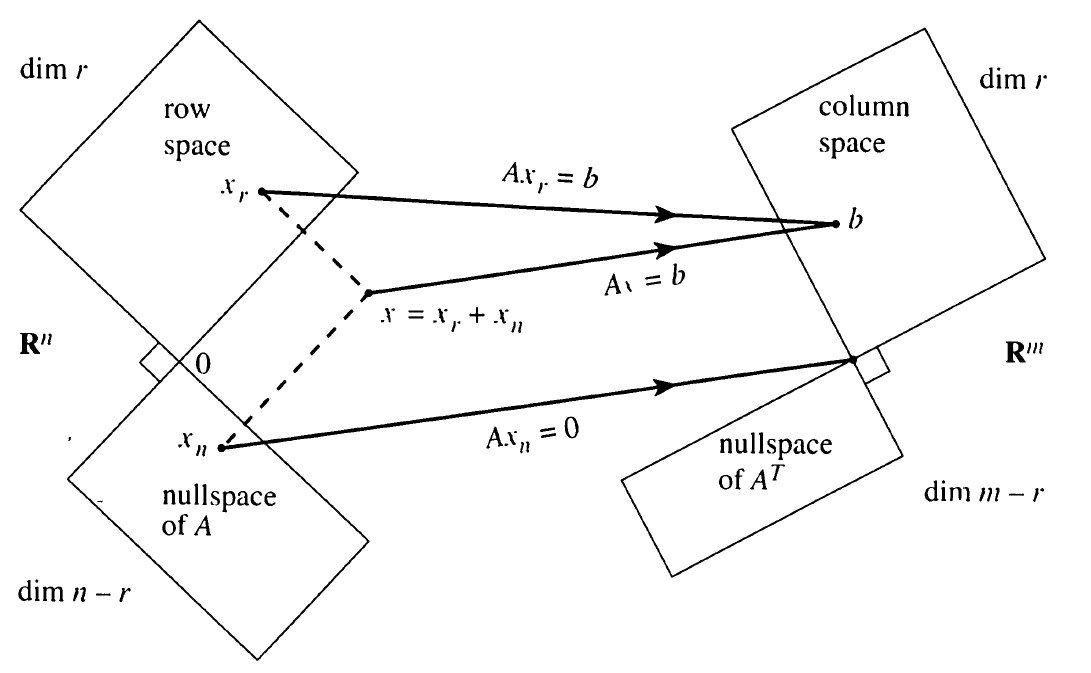
Four Fundamental Subspaces
For Matrix
Link to original
- The Subspaces are linked by the Fundamental Theorem of Linear Algebra
- Rowspace
- Nullspace of
- Columnspace
- Nullspace of , “Left Nullspace”
- Shows the relationship between the dimensions of the subspaces
- Shows the Morphisms between different subspaces of a matrix
- Show existence of solutions:
- Shows the Orthogonality relationship between related subspaces of a matrix
Columnspace
The Subspace defined by the Span of the columns of Matrix
See Rank
Link to original
Rowspace
The Subspace defined by the Span of the rows of Matrix
Link to original
Nullspace
The Subspace defined by the Set of that satisfy
See Nullity
Link to original
Basis
A Set of Basis Vectors. A set of Linearly Indepedent Vectors whose Linear Combinations can represent any vector in that space.
Standard Basis Vectors in are i, j, k, but you can use other vectors to span the same amount of space if you want.
- Let
- is some basis for the subspace
Dimension
The dimension of a Subspace is the Cardinality of its Basis
This is because a basis requires a Set of Linearly Indepedent Vectors, and does not meet this requirement. Therefore, its only basis is . The cardinality of the empty set is 0, therefore so is
Examples
Link to original
- dim
- dim(Nul A) is the number of
- number of free vars of A
- dim(Col A) is the number of
- number of pivots of A
- H =
- n variables, solve for ito everything else. → one pivot everything else free vars. Therefore free vars
Link to originalBasis Theorem
Any two bases for a Subspace have the same Dimension
Link to original
Rank
Link to original
- the rank of a matrix A is the dimension of its Columnspace
- number of Pivots
Nullity
Link to original
- The nullity of a matrix is the dimension of its Nullspace
- The number of Free Variables
Fundamental Theorem of Linear Algebra
Link to original
Invertibility Theorem
A is an , Square Matrix A is Invertible The columns of A are a Basis for Col A = rank A = dim Col A = n nullity A = dim Nul A = 0 Nul A = {}
Link to original
Determinant
Imagine the area of parallelogram created by the basis of a standard vector space, like . Now apply a linear transformation to that vector space. The new area of the new parallelogram has been scaled by a factor of the determinant. is the parallelopiped.
You can also just think of it as the area of the parallelogram spanned by the columns of a matrix
: parallelopiped and volume
(assume n by n matrix because we only know how to find determinants for square matrices)
You can also get the area of S by using the determinant of the matrix created by the vectors that span S, i.e. because you are shifting the standard basis vectors into the vector space dictated by S
Determinant Laws
- det(A) = 0 A is singular
- det(A) 0 A is invertible
- det(Triangular) = product of diagonals
- det A = det
- det(AB) = det A · det B
Determinant Post Row Operations
if A square:
Link to original
- if adding rows to rows on A to get B then
- if swapping rows in A to get B then
- if scaling one row of A by k, then = Exactly the same for columns
Cofactor Expansion
Cofactor expansion is a method used to calculate the Determinant of an matrix . It works by reducing the determinant of the matrix to a sum of determinants of submatrices. It is a recursive definition.
where is the determinant of the submatrix of obtained by deleting the -th row and -th column
The signs for each term of the expansion are determined solely by the position and follow a checkerboard pattern, starting with in the top-left corner
The determinant of a matrix can be calculated by cofactor expansion along any single row or any single column .
Expansion Along Row :
Expansion Along Column :
Strategy: To simplify calculations, it is generally best to choose the row or column with the most zeros.
Link to original
Eigenstuff
Eigenvector
In Linear Algebra, an Eigenvector is a Coordinate Vector for which, applying the given Linear Transformation has the same effect as multiplying that vector by a scalar. In other words, vectors for which the Output Space of the given linear transformation is proportional to the Input Space.
- Let be a Square Matrix that represents a linear transformation.
- Let be some Coordinate Vector that we need to solve for.
- Let be some Scalar that we need to solve for.
- By solving the following equation, we find eigenstuff
- Eigenvalues are nonzero scalar values that solve the equation
- Eigenvectors are coordinate vectors that solve the equation
- Eigenspaces are the spaces that extend from the eigenvectors (the spans of the eigenvectors)
- Each eigenvector has a corresponding eigenvalue, i.e. each eigenvector has a specific amount that the linear transformation scales it by
- The following GIF shows a linear transformation scaling 2D space. The red lines are the eigenspaces of the transformation. Any coordinate vector part of those spaces is an eigenvector.
Eigenvalue
is an eigenvalue for the transformation
- Solve for in , which yields the Characteristic Equation for this system, e.g. in a 2D systems it is .
- point same direction
- point opposite direction
- can be complex even if nothing else in the equation is
- Eigenvalues cannot be determined from the reduced version of a matrix ⭐
- i.e. row reductions change the eigenvalues of a matrix
- The diagonal elements of a triangular matrix are its eigenvalues.
- A invertible iff 0 is not an eigenvalue of A.
- Stochastic matrices have an eigenvalue equal to 1.
- If are eigenvectors that correspond to distinct eigenvalues, then are linearly independent
Defective
An eigenvalue is defective if and only if it does not have a complete Set of Linearly Independent eigenvectors.
Due to ‘s contribution,Neutral Eigenvalue
Eigenspace
- the span of the eigenvectors that correspond to a particular eigenvalue
Link to original
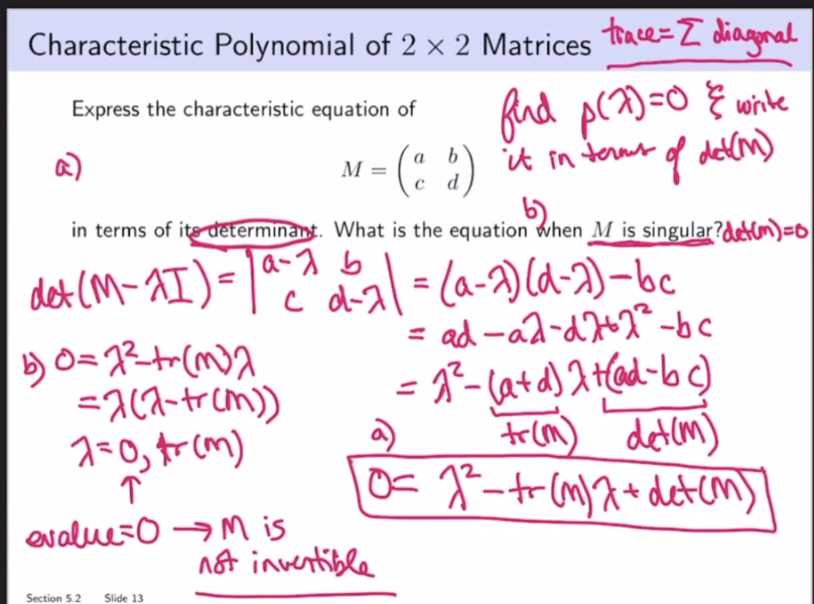
Characteristic Equation
to get values for . Recall means noninvertible. If a matrix isn’t invertible, then we won’t get trivial solutions when solving. Also the idea of reducing the dimension through the transformation is relevant; squishing the basis vectors all onto the same span where the area/volume is 0. Recall eigenvectors remain on the same span despite a linear transformation.
is an eigenvalue of A is singular
trace of a Matrix is the sum of diagonal
Characteristic Polynomial
n degree polynomial → n roots → maximum n eigenvalues (could be repeated)
Algebraic Multiplicity
Algebraic multiplicity of an eigenvalue is how many times an eigenvalue repeatedly occurs as the root of the characteristic polynomial.
Geometric Multiplicity
Link to original
- Geometric multiplicity of an eigenvalue is the number of eigenvectors associated with an eigenvalue; , which is saying how many eigenvector solutions does this eigenvalue have (recall is number of free vars in )
Similar
Link to original
- square matrices A,B are similar we can find P so that
- A,B similar same Characteristic Polynomial same eigenvalues
Systems of Linear Equations
Linear System
A system of Linear Equations.
Representation
There are several equivalent ways to represent a linear system.
A system of Equations
Link to original
Linear Equation
An Equation where in the above form where the the a’s are coefficients, x’s are variables, n is the dimension (number of variables), e.g. has two dimensions
Link to original
Row Reduction
Row Operation
Row Operation
- Replacement/Addition
- Interchange
- Scaling Row operations can be used to solve systems of linear equations
Single row operations can be represented by an Elementary Matrix
A system of equations written as an Augmented Matrix
Row operation example (these are augmented)
Link to originalConsistent
A linear system is considered consistent if it has solution(s)
Theorem for Consistency
A linear system is consistent iff the last column of the augmented matrix does not have a pivot. This is the same as saying that the RREF of the augmented matrix does not have a row of the form
Moreover, if a linear system is consistent, then it has 1. a unique solution iff there are no free variables. 2. infinitely many solutions that are parameterized by free variables
Row Equivalent
Row Equivalent
If two matrices are row equivalent they have the same solution set, meaning that they have a Bijection through Row Operations
Link to originalEchelon Form
Link to originalEchelon Form
A rectangular matrix is in echelon form if
- If there are any, all zero rows are at the bottom
- The first non-zero entry (leading entry) of a row is to the right of any leading entries in the row above it
- All elements below a leading entry are zero
For reduced row echelon form
- All leading entries, if any, are equal to 1.
- Leading entries are the only nonzero entry in their respective column.
Pivot
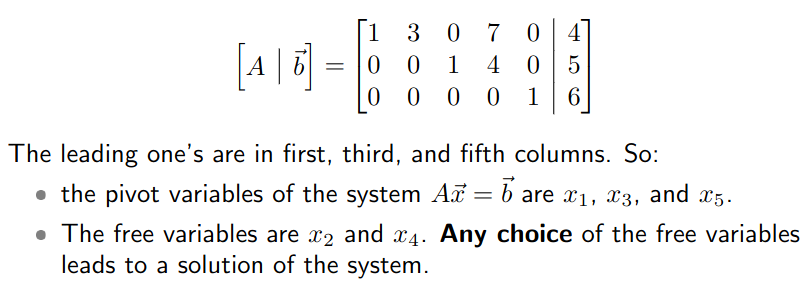
- A Pivot in a matrix A is a location in A that corresponds to a leading 1 in the RREF of A
- A Pivot column is the column of the pivot
Free Variable
Free variables are the variables of the non-pivot columns
Link to original
- Any choice of the free variables leads to a solution of the system
- If you have any free variables you do not have a unique solution]
Vector Equations
Vector Equation
An Equation comprised of Vectors, rather than Scalars.
For example, the vector equation of a Space Curve through
Link to original
Real Number
A Real Number is a Number that represents a continuous quantity.
Link to original
- is all real numbers
- Contains , the Set of Rational Numbers
- is dimensions of
- is rows and columns
Linear Combination
Let is a linear combination of the vectors, with weights of the ‘s
Link to original
Span
- The Set of all Linear Combinations of the ‘s in called the span of the ‘s
- e.g.
Link to original
- any 2 vectors in that are not scalar multiplies of each other span Q: Is
Homogenous
When an Equation has a “trivial” solution or
Homogenous System
Homogenous System
Homogenous systems always have a trivial solution, so naturally we would like to know if there are nontrivial, perhaps infinite solutions, namely if there is a free variable and a column with no pivots
Link to originalHomogenous Differential Equation
Link to originalHomogeneous Differential Equation
A Linear Differential Equation satisfied by .
Link to original
Linear Independence
Linear Independence
The only solution to is the trivial Linearly Independent
Geometric Interpretation
If two vectors are linearly independent, the are not colinear If 3, then not coplanal If 4, not cospacial
Linear Dependence
Link to original
- Any of the vectors in the set are a linear combination of the others
- If there is a free variable, so there are infinite solutions to the homogenous equation
- If the columns of A are in , and there are basis vectors in (which is always true), then if the amount of columns in A exceeds the amount of basis vectors that exist in that dimension, it means that there are free variables, which indicates linear dependence
- If one or more of the columns of A is
- Iff
Intro to Linear Transformations
Linear Transformation
A Linear transformation is a Transformation where
- where
- Domain of T is (where we start)
- Codomain or target of T is
- The vector is the image of under T
- The set of all possible images is called the range
- image range codomain
- When the domain and codomain are both , you can represent them as a Cartesian Graph in , as in a mapping of
- If y is the codomain and x is the domain, the range is the range, the domain is all the images of f(x)
- Addition Rule
- T(u + v) = T(u) + T(v)
- Multiplication Rule
- T(c) = cT(v)
- Prove a transformation is linear by proving the addition and multiplication rules.
- “Principle of Superposition”
- If we know , …, then we know every T(v)
1-1
Injective
If there is at most one location in the Codomain for every location in the Domain
Link to original
- 1-1 every column of T is a pivot column
- 1-1 iff standard matrix has pivot in every column
Onto
Surjective
If there is a location in the Codomain for every location in the Domain
Link to original
- TLDR: Onto every row of T is a pivot row
- onto iff the standard matrix has a pivot in every row
- The matrix A has columns which span .
- The matrix A has all pivotal rows.
Bijective
Bijective
If there is exactly one location in the Codomain for every location in the Domain for the Transformation
Link to original
- Needs square matrix
Matrix Multiplication is a Linear Transformation
Compute
Calculate so that
Give a Give a that is not in the range of Give a that is not in the span of the columns of (Same question for all)
Range of is a bunch of images of the following form:
For to not be in the range of , it cannot be in the above form, e.g. it can be
Link to original
Matrix of Linear Transformations
The standard (basis) vectors
Circular transclusion detected: Mathematics/Algebra/LinearAlgebra/Basis
Basis Vector
A Vector that an element of a Basis for a Vector Space, which is a Set of Linearly Indepedent whose Linear Combinations can represent any vector in that space.
Standard Basis Vector
Standard basis vectors in that have a one entry for each dimension, and zeros for the rest,
Link to original
- e.g. for :
- You could choose any basis for so long as it is linearly independent, but the standard basis for a dimension is the most convienient one
Standard Matrix
A standard matrix is a Matrix that represents a Linear Transformation, where the transformation can be expressed as . It is found by applying the transformation to the Standard Basis Vectorss and using the results as the columns of the matrix
Theorem
Let be a Linear Transformation. Then there is a unique Matrix such that In fact, is a and its column is a vector
Example
Find standard matrix A for T(x) = 3 for x in
Link to original
Zero Matrix
A Matrix full of zeroes.
Link to original
- Multiplying any matrix by the zero matrix yields a zero matrix, though not neccessarily the same zero matrix
- The Zero Vector is a special case
Identity Matrix
A Matrix full of zeroes, except for ones on the diagonal.
Link to original
- Called the Identity matrix, because it follows the Multiplicative Identity Property
- It is denoted as or to indicate , but is usually obvious based on context
Circular transclusion detected: Mathematics/Algebra/LinearAlgebra/Zero-Matrix
Circular transclusion detected: Mathematics/Algebra/LinearAlgebra/Identity-Matrix
Matrix
A matrix is a rectangular array of Numbers
Operations
Matrix Addition
- Add elementwise
- Operand matrices must have the same dimensions
Matrix Multiplication
Let
- Then, the entry of is , where we are performing many Dot Products to calculate the matrix product
- Then
Multiplication Properties
Transpose
Transpose Properties
Inverse
- Row reduce until you get for A
- Keep track of the Elementary Matrix for each Row Operation
- The product of all of the elementary matrices is the inverse of , by definition
- may not be invertible. In this case, you won’t be able to row reduce it to the Identity Matrix
Invertible
You cannot always take the inverse of a matrix. Whether or not it is possible is called Invertibility. See also Invertible Matrix Theorem, Invertibility Theorem.
Invertibility Definition: is invertible if
- A is invertible A is square
- A is invertible it is row equivalent to the identity
- Linearly dependent Singular
- Mnemonic: After the trial, Johnny Depp was Single
- Linearly independent Invertible
- This is just the inverse of the above
- is invertible
- Basically means that A is Bijective
- invertible
Inverse Properties
Inverse Shortcut
Link to original
Elementary Matrix
An elementary matrix, , is one that differs by by one Row Operation.
Link to original
Singular Matrix
A Matrix that is not Invertible
Link to original
Block Matrix
A Matrix that you write as a matrix of matrices
When doing multiplication with a block matrix, make sure the “receiving” matrix’s entries go first, to respect the lack of commutativity in matrix multiplication. See Multiplication
Link to original
LU Decomposition
If A is an Matrix that can be row reduced to Echelon Form without row exchanges, then
- where is a composition of elementary matrices such that it is a Lower Triangular Matrix where all of its diagonal entries are 1
- is an Echelon Form of
The Process
Suppose A can be row reduced to echelon form U without interchanging rows, i.e.
You can construct by finding each and multiplying them all together. Alternatively you can construct such that the sequence of row operations that convert to would convert to
Link to original
Markov chains
Probability Vector
Some Vector with nonnegative elements that sum to 1
Link to original
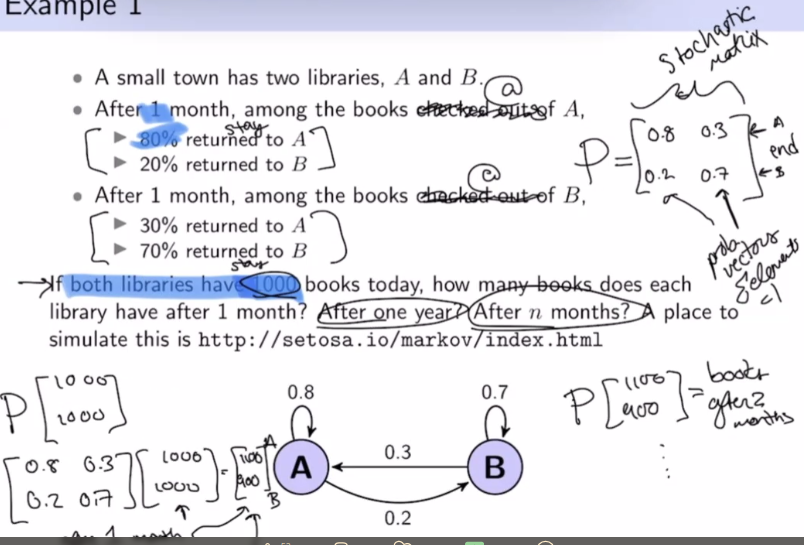
Stochastic Matrix
A stochastic matrix is a Square Matrix whose columns are Probability Vectors.
|det(P)| ⇐ 1, only volume contracting or preserving
Theorem as
If is a regular stochastic matrix, then has a unique steady-state vector , and converges to as ; where
Regular
Link to original
- Stochastic matrix is regular if there strictly has positive entries
- Regular unique steady state vectors
- Irregular steady state vectors
Markov Chain
A Markov chain is a sequence of Probability Vectors, and a Stochastic Matrix P , such that:
Link to original
Diagonalization
Diagonalization
Diagonal Matrix
A matrix is diagonal if the only non-zero elements, if any, are on the main diagonal.
- If is diagonal, then is very easy to compute because you simply exponentiate every diagonal element by
Diagonal matrices cannot have
Strang
Consider a matrix with some eigenvalues and eigenvectors. …
Diagonalizable
Orthogonal Diagonalization
Link to original
Diagonalizable
is diagonalizable, where is a diagonal matrix
is diagonalizable has linearly independent eigenvectors. i.e.
where vectors are linearly independent eigenvectors, and are the corresponding eigenvalues, in order.
Distinct Eigenvalues
If and has distinct eigenvalues, then is diagonalizable
Non-distinct Eigenvalues
You check that the sum of the geometric multiplicities is equal to the size of the matrix. e.g. for
Find the eigenvalues:
We know that geomult ⇐ algmult. Therefore has 1 distinct eigenvector. This means has to have 2 distinct eigenvectors to form a basis, so if it doesn’t then the matrix is not diagonalizable.
There is only one free columns here. Therefore, the dimension of the Nullspace is one, not two, which means the matrix is not diagonalizable.
Basis of Eigenvectors
Misc.
Link to original
Complex Eigenvalues
Complex Number
The Complex Numbers are a Number Set denoted by that extends the Real Numbers via the Imaginary Unit
- is a Vector Space Isomorphism of
- Like , the complex numbers can be represented within the Cartesian Plane.
- is a closed Algebraic Field
Complex numbers are of the form
- where
- where is the Imaginary Unit
Euler's Formula
Link to original
- Consequence of Euler’s Identity
- Suppose has an angle and has
- The product has angle , and modulus
Operations
Binary
Addition
Like adding Vectors in
Subtraction
Like subtracting Vectors in
Multiplication
Division
Unary
Real Component Function
Imaginary Component Function
Argument
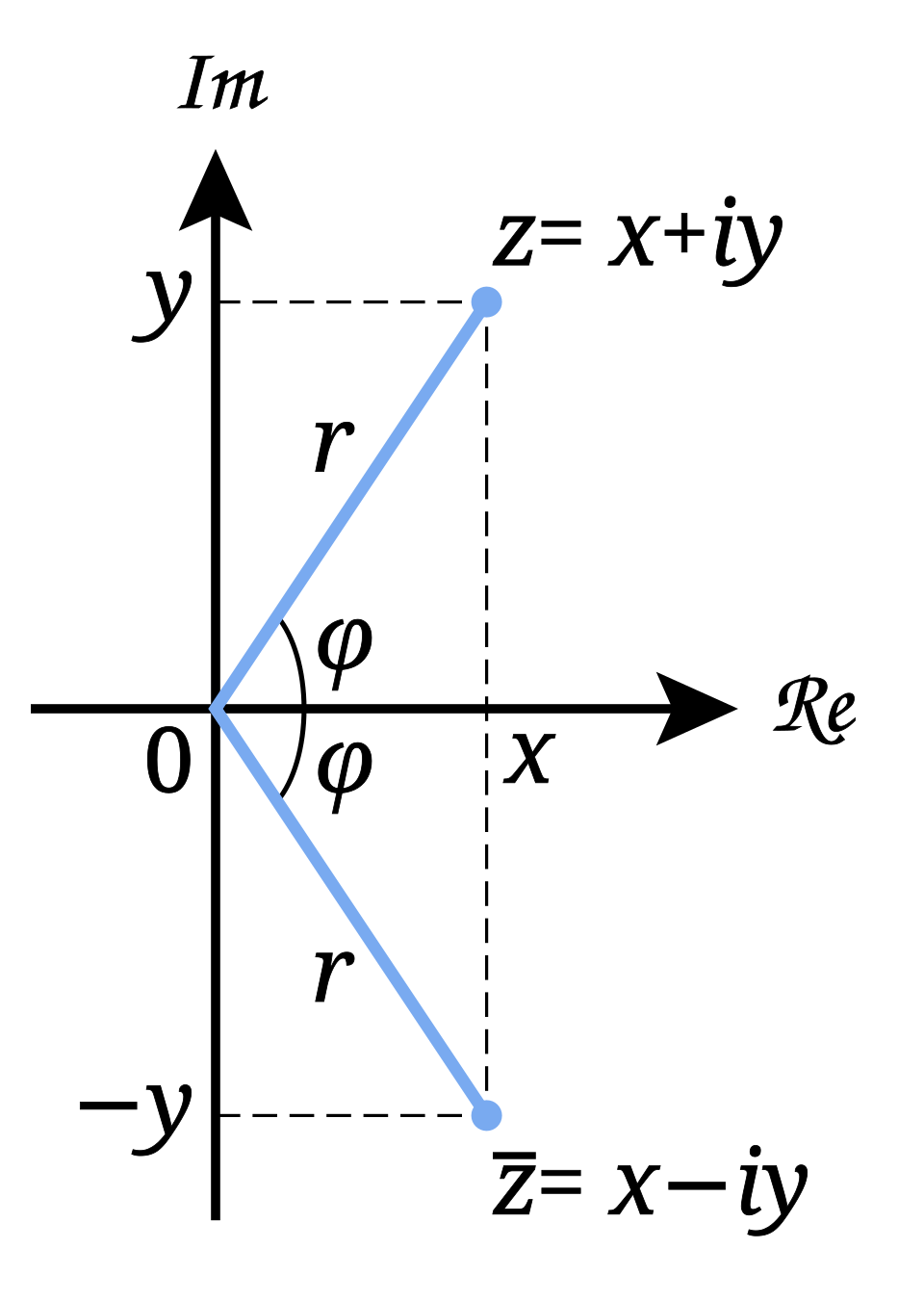
Complex Conjugate
Reflects across the Real axis.
Magnitude
Also called “Modulus”
Link to original
The magnitude is the in the figure.
Circular transclusion detected: Mathematics/SetTheory/Complex-Number
Complex Eigenvalues
Complex Eigenstuff
Complex roots coming in complex conjugate pairs implies that complex Eigenvalues and their Eigenvectors come in complex conjugate pairs. This is because eigenvalues are the solutions to the Characteristic Equation, which is a Polynomial equation.
Link to original
Example
4 of the eigenvalues of a 7 x 7 matrix are -2, 4 + i, -4 - i, and i
- Because there are 3 nonconjugate complex pairs, we know that the remaining eigenvalues are the conjugates of the given complex values
- What is the characteristic polynomial?
Example
The matrix that rotates vectors by radians about the origin and then scales vectors by is:
What are the eigenvalues of ? Find an eigenvector for each eigenvalue
:
:
Could reason the eigenvalue for by the fact that eigenvalues and their eigenvectors come in complex conjugate pairs.
Orthogonal Sets
Orthogonal
Perpendicular.
- and are orthogonal if
- If is a subspace of and , is orthogonal to if it is orthogonal to every vector in
- The set of all vectors orthogonal to a subspace is a itself a subspace, called the Orthogonal Complement of , , W perp
- is orthogonal to each row of
- is orthogonal complement to
- number of columns
Link to original
Orthogonal Set
A Set of Vectors are an orthogonal set of vectors if every pair in the set is Orthogonal to every other vector in the set.
Linear Independence for Orthogonal Sets
If there is an orthogonal set of vectors , then
Expansion in Orthogonal Basis
If is the Basis for Subspace in and is an orthogonal basis, then for any vector
Link to original
Orthogonal Projection
Link to original
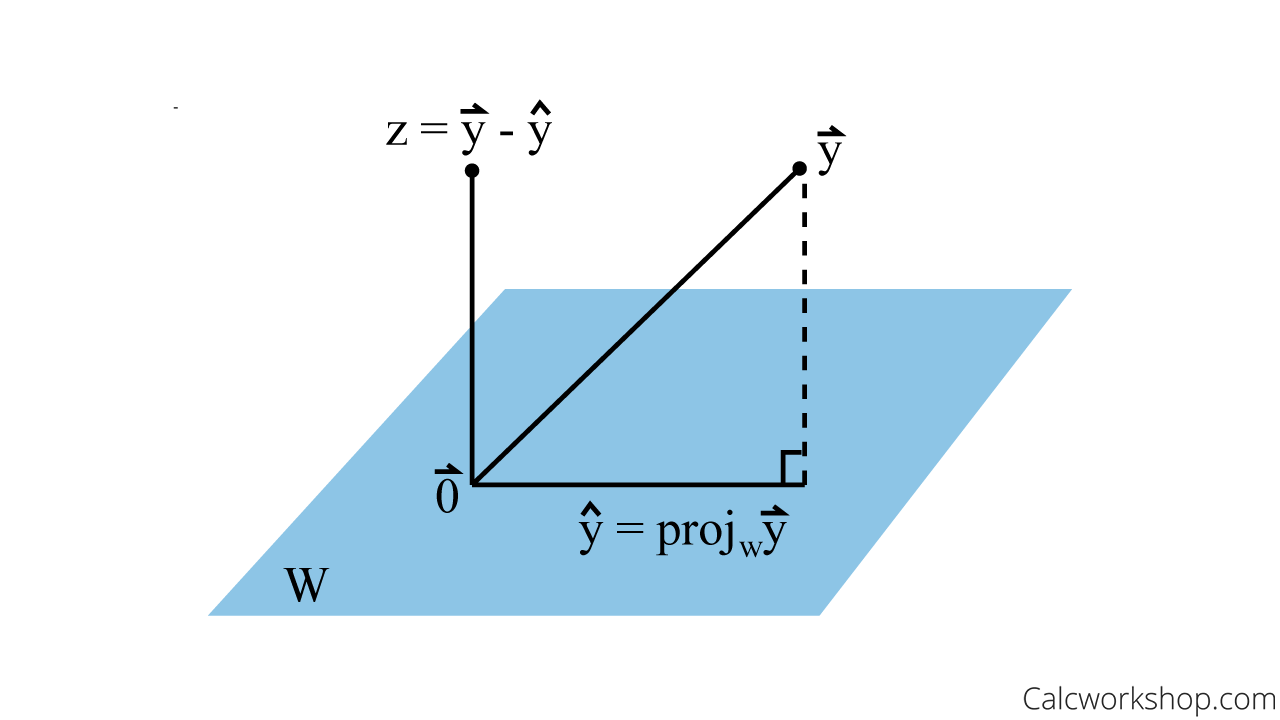
Orthogonal Decomposition
I proceed to define the orthogonal decomposition for some vector , where , where is a subspace of , where is the Orthogonal Complement of , where is the orthogonal projection of onto , and is a vector orthogonal to . This is a Vector Decomposition.
- Every has a unique sum in the form above, so long as is a subspace of
Concerning
If is an Orthogonal Basis for , then , the orthogonal projection of onto is given by:
See Best Approximation, but in essence is the closest vector in to
Examples:
Link to original
Best Approximation
is a subspace of , ,
In other words, is closest vector in to See Orthogonal Decomposition, especially for the visual interpretation of this.
Link to original
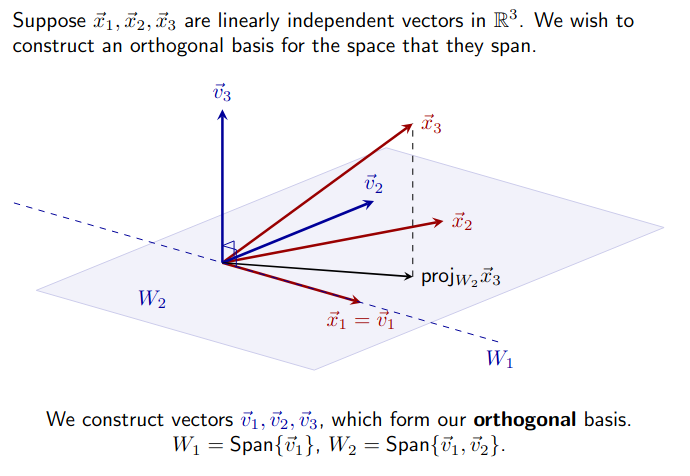
Gram-Schmidt Process
Let be a set of vectors that form a basis for subspace of , Let be a set of vectors that form an Orthogonal Basis for The Gram-Schmidt process defines how can be derived from It depends on Orthogonal Decomposition
If , iteratively define vectors in
Examples
Link to original
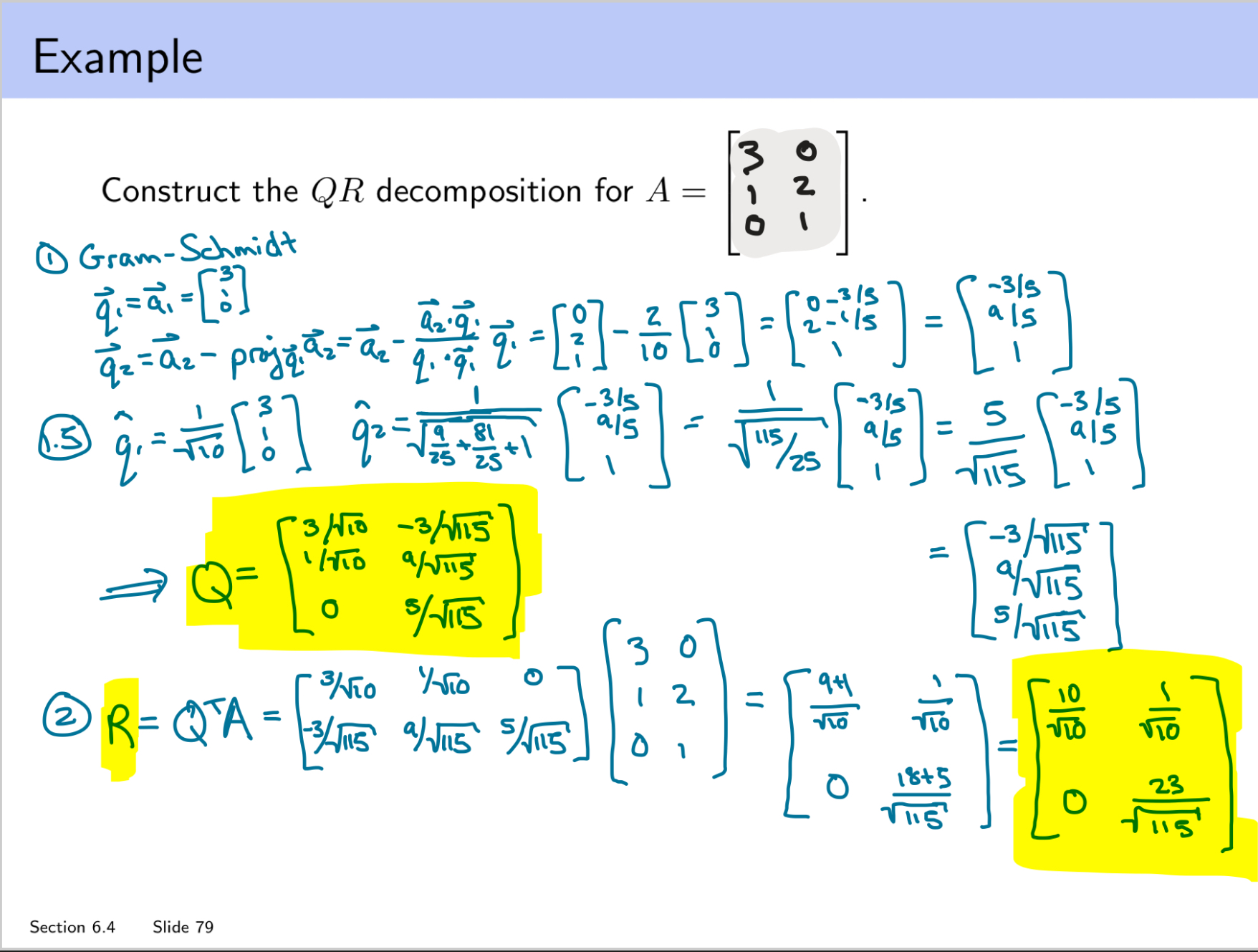
QR Decomposition
For any matrix , with Linearly Indepedent columns:
Q is
- m x n
- its columns are an orthonormal basis for Col A R is
- n x n
- upper triangular
- positive diagonal
- where and are columns of R and A
Link to original
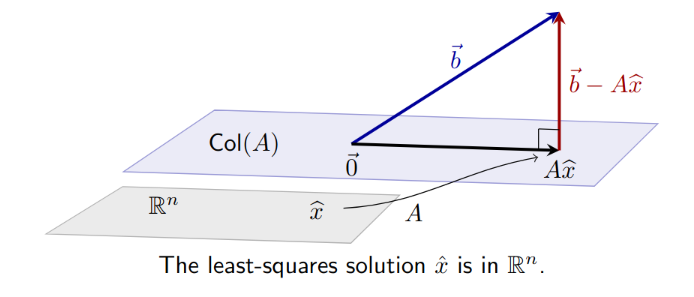
Least Squares
Given
Given many data points, construct a matrix equation in the form of a linear equation (this matrix equation will be overdetermined). The matrix equation below is This equation is linear but it doesn’t have to be, just adjust accordingly to represent the equations as a matrix equation.
Goal
Using Best Approximation, find a vector in subspace closest to
is a subspace of , , i.e. Note: Can only use Orthogonal Decomposition for when the columns of A form an orthogonal basis, by definition
In other words, is closest vector in to Note: is a unique vector, a special that minimizes the above equation. Note: If the columns of are orthogonal, then you can just use the scalar projection of onto each column of .
Normal Equations
The least squares solutions to corresponds to the solution to
- Turns the equation from above and transforms it into a square matrix equation
Derivation
- is the Least Squares Solution to
Normal Equation Usage
- Use when non-square matrix
- Over/Under determined
- Regression
Theorem (Unique Solutions for Least Squares)
If A is m x n
- Ax = b has a unique least squares solution for each b in Rm
- Cols of A are linearly independent
- The matrix A^T A is invertible If the above hold, the unique least square solution is
If the above conditions are not true, there may be infinitely many solutions, or some other nonunique amount of solutions, in which case you should consider instead.
Note: plays the role of the “length squared” of the matrix A
Theorem (Least Squares and QR)
Examples
Hampton Explanation for Least Squares
Let . is the unique, minimizing solution to the equation such that
Link to original
- Essentially, minimize
- is the minimal distance between the different solutions
- Goal: Find s.t. is closest to
- in this context just denotes the special/unique that minimizes the distances between and
b is closer to Axhat than to Ax for all other x in Col A
- If b in Col A, then xhat is…
- Seek so that is as close to as possible, i.e. should solve Axhat = bhat
Google Page Rank
Link to original
Symmetric Matrix
Definition
Matrix A is symmetric if A^T = A
The eigenspaces of a symmetric matrix are orthogonal
Link to original
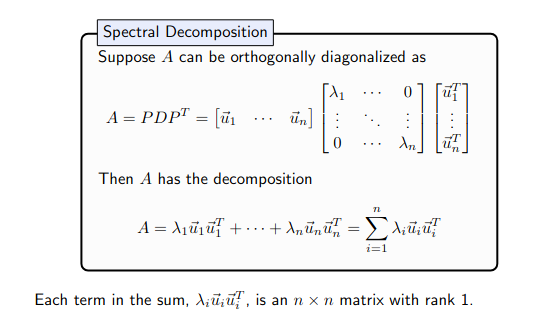
Spectral Decomposition
https://www.youtube.com/watch?v=mhy-ZKSARxI
Symmetric
Recall: If P is an orthogonal n × n matrix, then P −1 = P T , which implies A = PDP^T is diagonalizable and symmetric.
Spectral Thm
An n × n symmetric matrix A has the following properties.
- All eigenvalues of A are real.
- The dimenison of each eigenspace is full, that it’s dimension is equal to it’s algebraic multiplicity.
- The eigenspaces are mutually orthogonal.
- A can be diagonalized: A = PDP^T , where D is diagonal and P is orthogonal.
Spectal Decomp
Link to original
Orthogonal Diagonalization
Like Diagonalization, but you perform it on an orthogonal matrix, which makes the process easier as follows:
Where , i.e. is orthogonal It is otherwise the same as performing diagonalization on an arbitrary matrix
Link to original
Quadratic Form
Change of variable
Positive Definite Positive Semidefinite Negative Definite Negative Semidefinite
Link to original
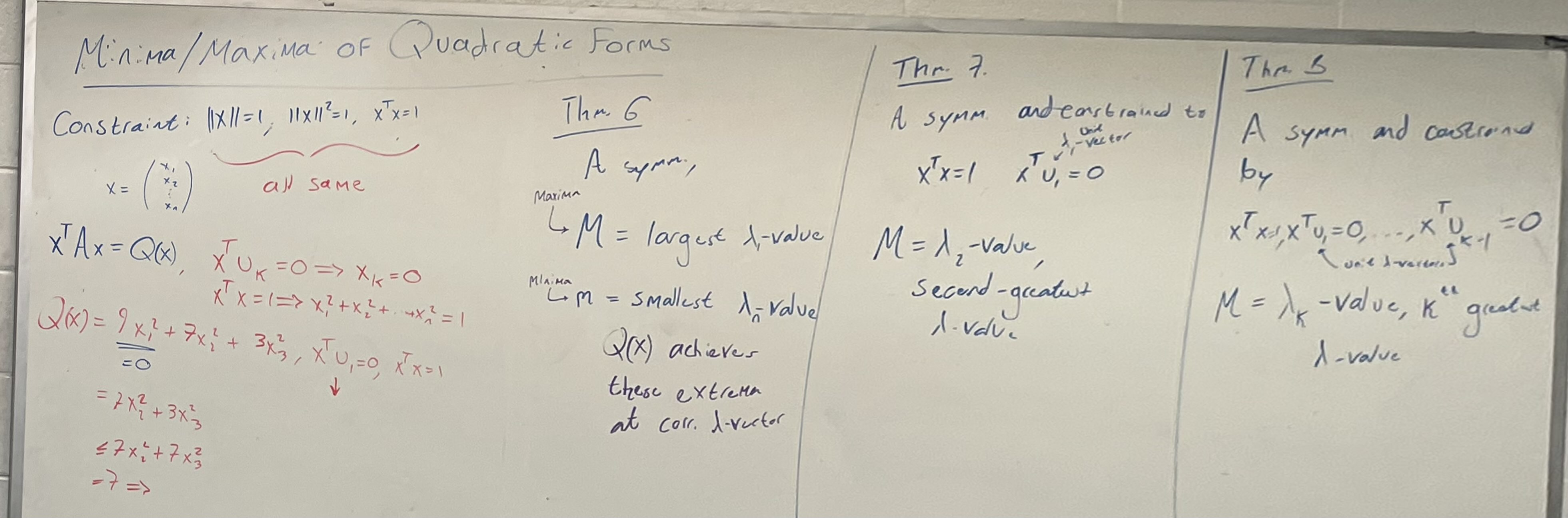
Constrained Optimization
Q: When for the first greatest eigenvalue, and the remaining ones were -2, and 0, the next maximum was -2 instead of 0?
Link to original
Singular Value Decomposition
https://www.youtube.com/watch?v=vSczTbgc8Rc
Applications
- If A is a invertible square matrix then the condition number is the largest singular value divided by the smallest singular value
- Condition number describes the sensitivity of a solution to Ax = b to errors in A
- A problem with a low condition number is said to be well-conditioned, while a problem with a high condition number is said to be ill-conditioned
- Describe difficulty in computing inverse
- Chaos: small change in input results in massive change in output
- Can use SVD to talk about rkA, ColA, RowA, NulA, , etc.
rkA = rk
- ColA = U columns through dim A
- bc
- Col A perp = U columns after dim A
- by def
- Nul A = V columns that correspond to the free columns of U
Process
and are square, guaranteed.
- Singular values:
- Construct using the singular values. has the same shape as , with a diagonal matrix of the singular values in the top left corner
- V = matrix of eigenvectors of
- Compute an orthonormal basis for Col A: use for dim
- Afterwhich, extend and fill up the remaining orthonormal basis
- Option A: Rawdog itthink about it, so to speak
- Option B: Gram-Schmidt Process
- Option C: Use
- Construct the columns of with the vectors
- Note: for U you can also get it via the V process but with , for eigenvalue 0, find eigenvector
- V and U are orthogonal btw, and they have dimensions of and
where , are the columns of and
Link to original