- Market
- Interactive Desktop, Server
- Goals
- Efficiency, interactivity, real-time, no Starvation
- 3 Classes of tasks
- Real-time First Come First Serve, Real-time Round Robin, Timeshared
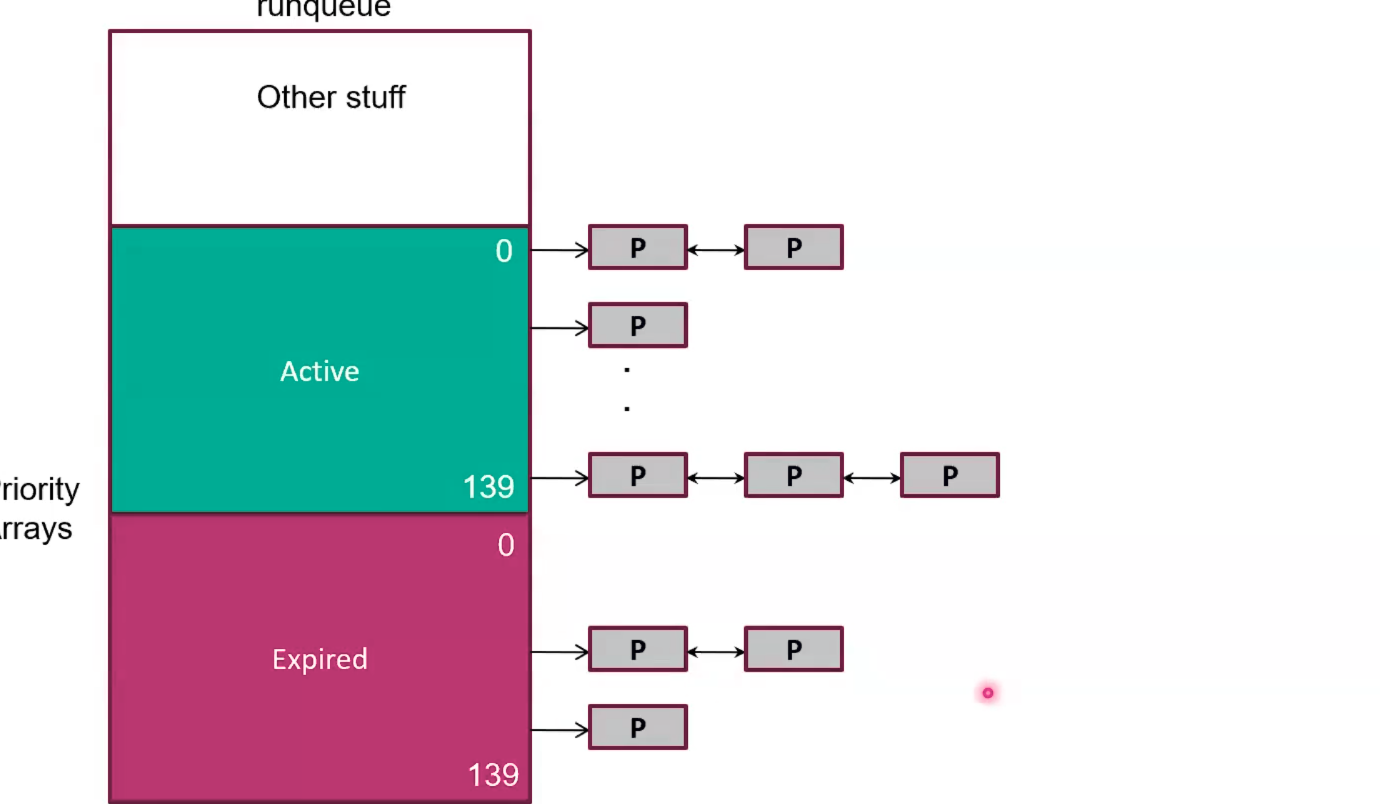
- 140 Priority; basically has 140 Ready Queues
- 0-99 for real-time; remaining for timeshared
- Carrot and Stick approach
- Reward Good behavior
- Punish bad behavior
- Reward interactive I/O by increasing priority
- Punish compute bound tasks by decreisng priority
- Starvation Threshold
- Set a time interval (starvation goal) for the threshold waiting time that determines a process is being starved by higher priority processes
- When starvation occurs, give the process a time slice at the highest interactive priority
- Winner is the first task in the highest priority list in the active array
- If the task blocks (due to I/O) put it aside and pick the next highest one to run
- If the time quantum runs out (doesn’t apply to real time tasks) for the current task, place it in the expired array
- On I/O completion, place the relevant task in the active array at the right priority level, having adjusted its remaining time quantum
- When the active array is empty, flip the active and expired array pointers and continue with the scheduling algorithm (i.e. the expired array becomes the active array and vice versa).
- This scheduler is O(1)