2D Homogeneous Linear Systems with Constant Coefficients
Distinct Real & Nonzero Eigenvalues
Loosey goosey explanation
Recall “Think of matrices as a generalization of the number system” Well it turns out that , where A is diagonalizable where are A’s eigenvalues, and are ‘s eigenvectors. See Eigenstuff.
Find the eigenvalues of by solving the Characteristic Polynomial We assume that
We find ‘s eigenvector by solving We find ‘s eigenvector by solving The general solution for is
If an initial condition is given, then there is a unique solution.
Stability & Phase Portrait
Col
![[Pasted image 20250905173724.png|Stable Nodal Sink, Asymptotically Stable]]
![[Pasted image 20250905173930.png| Nodal Source, Unstable]]
![[Pasted image 20250905180026.png| Saddle, Unstable]]
A Zero Eigenvalue
This is a specific case of the previous section. This is the same as the previous section Distinct Real & Nonzero Eigenvalues, except We assume , which implies
This is a simplification of the general formula from Distinct Real & Nonzero Eigenvalues On the eigenspace of the zero eigenvalue , the solutions are time independent; i.e., the eigenspace of the zero eigenvalue is a line of equilibrium. The other eigenvalue determines the behavior of the phase space outside of the equilibrium line.
Stability & Phase Portrait
Both cases have
Col
![[Pasted image 20250912160920.png|, Attractive line of equilibirum, strictly stable|225]]
![[Pasted image 20250912160948.png|, Repulsive line of equilibrium, unstable|200]]
Repeated Real Eigenvalues
This is the same as the previous sections except We assume
Easy Case
where
This is a simplification of the general formula from Distinct Real & Nonzero Eigenvalues, where is formed by and , and we chose the Standard Basis Vectors for our eigenvectors, because any linearly independent pair of vectors in would be satisfactory.
Hard Case
where
We get the first term for this general solution from the typical method of finding eigenvectors, but because we have multiplicity of 2, our result is only one eigenspace, i.e. a partial solution. In order to get a full solution, we have to find a generalized eigenvector as well (the eigenvector for the second term). We get this eigenvector by solving , where was the eigenvector from the first term.
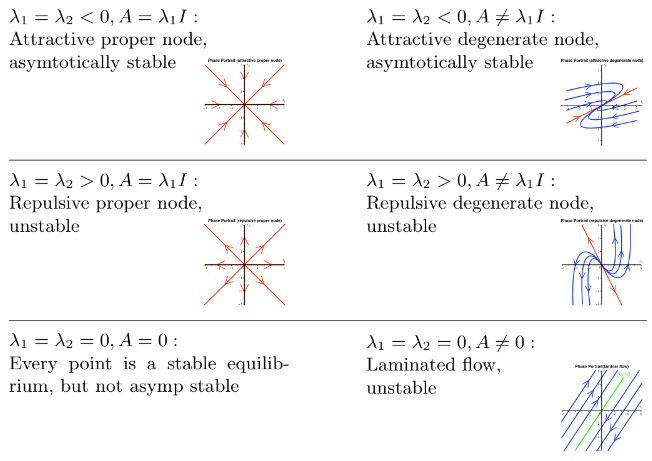
Stability and Phase Portrait
Complex Eigenvalues
This is the same as the previous sections except We assume
where is a complex solution to the system where gives the growth/decay rate where is the frequency of the oscillation of the system where where
When finding eigenvectors, for and , ignore the second row, because it can be eliminated by definition. See Misc. When you get , you can use either eigenvalue-eigenvector pair for the general equation. They will both give you the same solution, as the sign change will get absorbed in the s
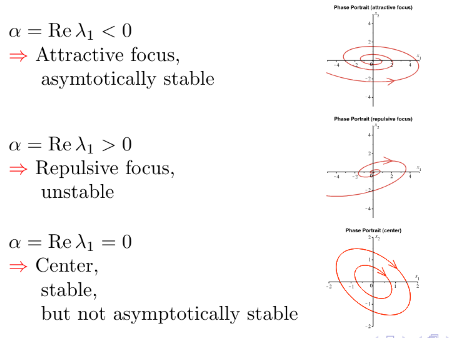
Stability and Phase Portrait
Apply matrix once, to get the initial velocity, to determine the direction of rotation scales the whole solution
Link to original
Shifted Systems of Linear Differential Equations
Transient Method
Substitute a variable into the system, so that we have a problem we know how to solve. Similar idea to U Substitution. Solution: Equilibrium + Transient
Type 1
, where A is a constant square matrix, is a constant vector Set , as is an equilibrium, and is the transient solution Solve for from . See 2D Homogeneous Linear Systems with Constant Coefficients Solution is
Example
(a) Find all equilibria (b) Find general solutions (c) Solve with the initial condition (d) Sketch the phase portrait (e) Determine the stability of each equilibrium
(a) This ODE is of the form , i.e. Type 1, so the equilbrium is (b) Let , so we have , which we know how to solve because it is a 2D Homogeneous Linear Systems with Constant Coefficients. Eigenvalues = Eigenvectors =
(c)
(d) Center the portrait at the equilibrium point Both eigenvalues are postitive, so the eigenspace arrows all go out. Because they have the same sign, the curves off of the eigenspaces are parabolas.
(e) The equilibrium is unstable.
Type 2
, where A is a constant square matrix, is a constant vector Essentially, convert into Type 1 by finding an equilibrium by solving for . If no equilbrium exists, you must use Variation of Parameters instead. Transient solution that satisfies , solve for . See 2D Homogeneous Linear Systems with Constant Coefficients Solution is
Link to original
2D Nonlinear Systems of Differential Equations
Equilibria
Find the equilibria by solving for all that satisfy
Linearization
Find the Linearization of the system.
where is the Jacobian matrix at a particular equilibrium point
where EP is each Equilibrium Point, where EP.x and EP.y are the x and y components
By definition at an equilibrium point, the function is equal to . See Equilibria.
Therefore the linearization becomes this:
The final expression for the linearization looks like this.
This is a Shifted Systems of Linear Differential Equations
Linearization in 1D with Complex Polynomials
The equilibrium points of this equation are The linearization at an equilibrium point is
In short, if you have a polynomial of order 1, the linearization is just f, but you drop the EP term. If the order is greater than 1, then the linearization is 0.
Perterbation
Given
Which is the exact form of the homogenous part of our Linearization, except we have
Neutral Eigenvalues () lead to structural instability, e.g. a perterbation leads to signficant change.
Approximating Dynamics
Given
We approximate the dynamics of the original system, by finding the dynamics of the Linearization
- TLDR: We find the Eigenstuff of the Jacobian, and use that to construct our Phase Portrait
- If the eigenvalues of the Jacobian lead to Unstable or Asymptotically Stable, then the approximation is sufficient to determine the dynamics of the original system
- If Stable, we consider the approximation “degenerate”, and conclude that the approximation is insufficient.
Lotka-Volterra Competition Model
where , are population sizes
where , are intrinsic per capita growth rates
where , are carrying capacities.
where , are competition coefficients
- where measures the negative effect tigers have on wolves
- where measures the native effect wolves have on tigers
Lotka-Volterra Predator-Prey Model
where🐰 is the prey population size
where 🐺 is the predator population size
where is the prey growth rate (birth rate)
where is the predation rate/interaction rate
where is the predator death rate
where is the conversion efficiency of prey into new predators.
Link to original
Misc
- Decaying eigenvector scalars decay the eigenspace, growing ones grow the whole eigenspace.