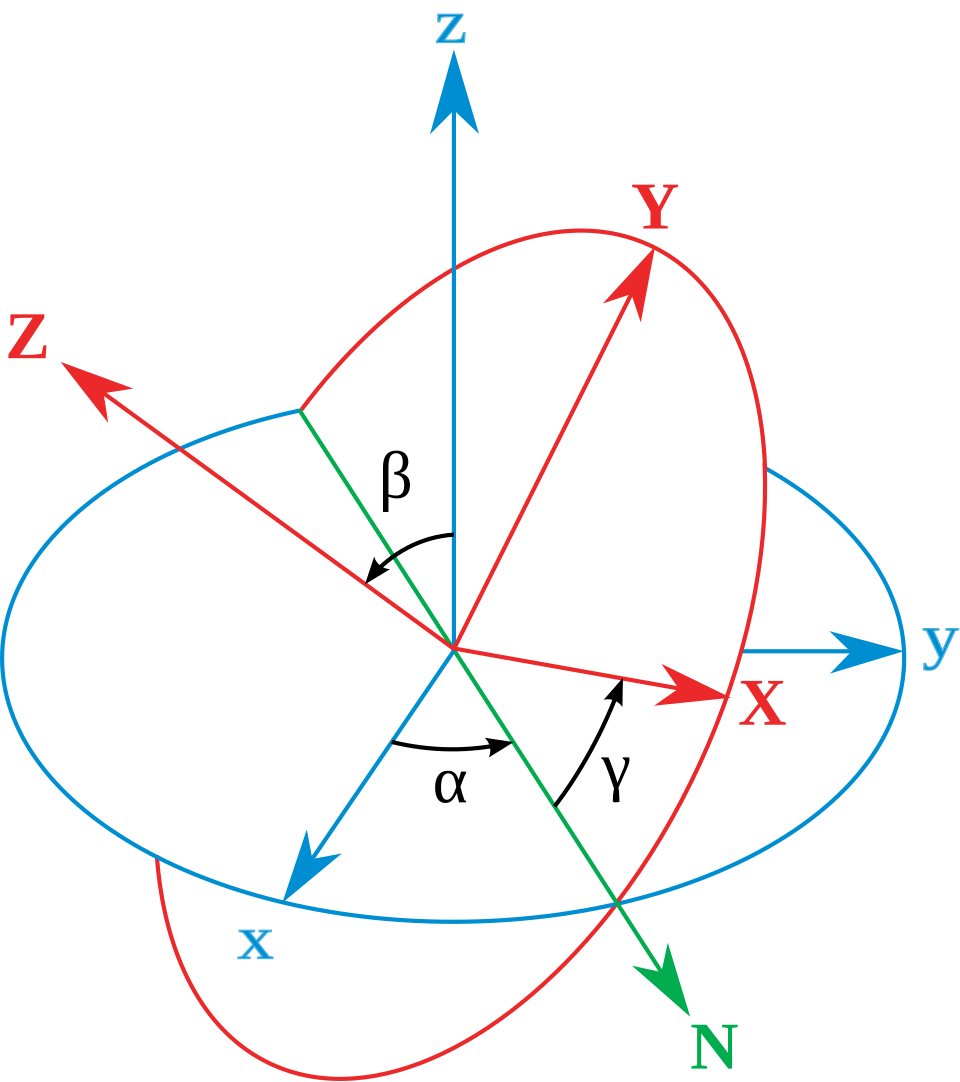
 A way of representing the orientation of a body in 3d space, using 3 angles. Each angle is rotation about one of the coordinate axes. The orientation is equivalent to performing each rotation in succession. The order absolutely matters.
A way of representing the orientation of a body in 3d space, using 3 angles. Each angle is rotation about one of the coordinate axes. The orientation is equivalent to performing each rotation in succession. The order absolutely matters.
- Has an issue called Gimbal Lock
- Has issues with interpolation between angles
Conventional Orders of Rotation
Tait-Bryan
- The aerospace convention
- Z, Y, X
- Yaw, Pitch, Roll
Proper Euler
- The physics convention
- Z, X, Z