Distinct Real & Nonzero Eigenvalues
Loosey goosey explanation
Recall “Think of matrices as a generalization of the number system” Well it turns out that , where A is diagonalizable where are A’s eigenvalues, and are ‘s eigenvectors. See Eigenvectors, Eigenvalues, and Eigenspaces.
Find the eigenvalues of by solving the Characteristic Polynomial We assume that
We find ‘s eigenvector by solving We find ‘s eigenvector by solving The general solution for is
If an initial condition is given, then there is a unique solution.
Stability & Phase Portrait
Col
![[Pasted image 20250905173724.png|Stable Nodal Sink, Asymptotically Stable]]
![[Pasted image 20250905173930.png| Nodal Source, Unstable]]
![[Pasted image 20250905180026.png| Saddle, Unstable]]
A Zero Eigenvalue
This is a specific case of the previous section. This is the same as the previous section Distinct Real & Nonzero Eigenvalues, except We assume , which implies
This is a simplification of the general formula from Distinct Real & Nonzero Eigenvalues On the eigenspace of the zero eigenvalue , the solutions are time independent; i.e., the eigenspace of the zero eigenvalue is a line of equilibrium. The other eigenvalue determines the behavior of the phase space outside of the equilibrium line.
Stability & Phase Portrait
Both cases have
Col
![[Pasted image 20250912160920.png|, Attractive line of equilibirum, strictly stable|225]]
![[Pasted image 20250912160948.png|, Repulsive line of equilibrium, unstable|200]]
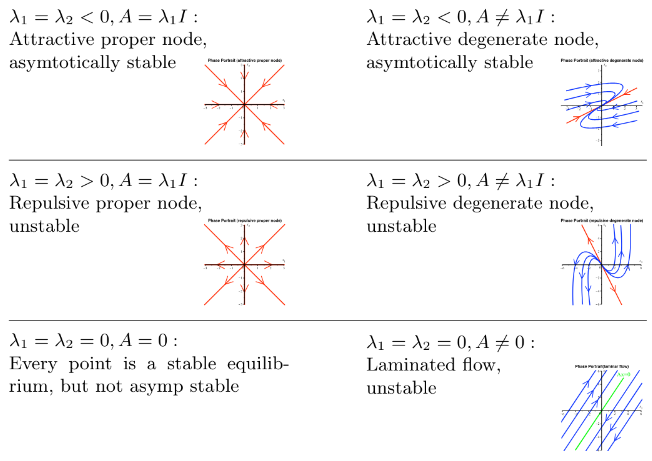
Repeated Real Eigenvalues
This is the same as the previous sections except We assume
Easy Case
where
This is a simplification of the general formula from Distinct Real & Nonzero Eigenvalues, where is formed by and , and we chose the Standard Basis Vectors for our eigenvectors, because any linearly independent pair of vectors in would be satisfactory.
Hard Case
where
We get the first term for this general solution from the typical method of finding eigenvectors, but because we have multiplicity of 2, our result is only one eigenspace, i.e. a partial solution. In order to get a full solution, we have to find a generalized eigenvector as well (the eigenvector for the second term). We get this eigenvector by solving , where was the eigenvector from the first term.
Stability and Phase Portrait
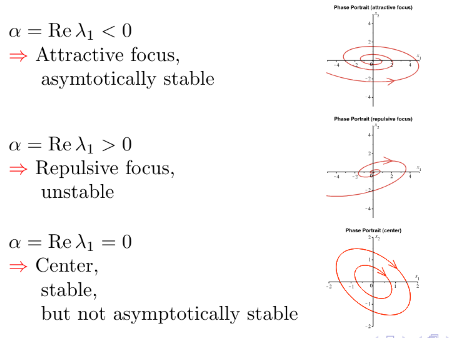
Complex Eigenvalues
This is the same as the previous sections except We assume
where is a complex solution to the system where gives the growth/decay rate where is the frequency of the oscillation of the system
When finding eigenvectors, for and , ignore the second row, because it can be eliminated by definition. See Misc. When you get , you can use either eigenvalue-eigenvector pair for the general equation. They will both give you the same solution, as the sign change will get absorbed in the s
Stability and Phase Portrait
Apply matrix once, to get the initial velocity, to determine the direction of rotation
scales the whole solution